T-2Can-FD get it now

概述
T-2Can-Fd 是一款基于 ESP32-S3 的双 CAN 总线开发板。提供两路独立 CAN 总线:CAN 总线 1 由外置 MCP2518FD 控制器(SPI,支持 CAN-FD,兼容 CAN 2.0)驱动;CAN 总线 2 使用 ESP32-S3 内置 TWAI 控制器(CAN 2.0B)。适用于工业通信、车载诊断、机器人控制等需要高可靠性和高数据吞吐量的 CAN 总线场景。
使用注意事项:
- 烧录固件时若失败,请按住
BOOT-0按键再尝试下载。- 使用 USB 串口调试时,默认配置 USB 作为 UART0 输出;如需使用外部 Uart 接口,请修改 CDC 设置(见 FAQ)。
快速开始
示例支持
| 示例 | PlatformIO/Arduino | 说明 |
|---|---|---|
| can | ✅ | CAN 通信示例(需适配 CAN FD) |
| original_test | ✅ | 出厂测试程序 |
PlatformIO
- 安装 Visual Studio Code 和 Python
- 在 VS Code 扩展中搜索并安装 PlatformIO IDE
- 克隆或下载项目仓库:
https://github.com/Xinyuan-LilyGO/T-2Can - 在 VS Code 中打开项目文件夹
- 打开
platformio.ini,在[platformio]目录下取消注释需要烧录的示例(default_envs = xxx,选择 T-2Can-Fd 对应配置) - 点击左下角 ✓ 编译
- 连接开发板,点击 → 上传
Arduino IDE
- 安装 Arduino IDE
- 安装 ESP32 开发板支持:工具 → 开发板 → 开发板管理器 → 搜索
esp32并安装Espressif Systems - 选择开发板:ESP32S3 Dev Module
- 将项目
libraries目录下的所有库复制到 Arduino 库目录(Sketchbook location/libraries) - 打开示例项目(
examples目录下的.ino文件) - 在 工具 菜单中选择如下配置:
| Arduino IDE (ESP32-S3) | Value |
|---|---|
| Board | ESP32S3 Dev Module |
| Upload Speed | 921600 |
| USB Mode | Hardware CDC and JTAG |
| USB CDC On Boot | Enabled |
| USB Firmware MSC On Boot | Disabled |
| USB DFU On Boot | Disabled |
| CPU Frequency | 240MHz (WiFi) |
| Flash Mode | QIO 80MHz |
| Flash Size | 16MB (128Mb) |
| Core Debug Level | None |
| Partition Scheme | 16M Flash (3MB APP/9.9MB FATFS) |
| PSRAM | OPI PSRAM |
| Arduino Runs On | Core 1 |
| Events Run On | Core 1 |
- 选择正确的端口,点击 上传
固件烧录(使用烧录工具)
- 打开项目
tools目录下的 ESP32 烧录工具 - 选择正确的芯片和烧录方式,点击 OK
- 按步骤选择 firmware 文件(位于
firmware/目录),设置地址,选择端口,点击烧录 - 若烧录失败,请按住 BOOT-0 按键再尝试
相关视频
暂无视频教程,欢迎贡献。
主要特性
- 主控:ESP32-S3-WROOM-1U (16 MB Flash + 8 MB PSRAM)
- CAN 总线 1:外置 MCP2518FD 控制器(SPI,支持 CAN-FD,兼容 CAN 2.0)
- CAN 总线 2:ESP32-S3 内置 TWAI 控制器(CAN 2.0B)
- 支持 Wi-Fi + Bluetooth 5.0 LE
- USB 供电,板载 5V 降压电路
- 提供 Uart 扩展接口(可通过配置切换 CDC)
- 紧凑型设计,适用于车载、工业现场总线
产品参数
| 特性 | 规格 |
|---|---|
| MCU | ESP32-S3-WROOM-1U |
| Flash | 16 MB |
| PSRAM | 8 MB |
| CAN FD 控制器 | MCP2518FD(SPI,支持 CAN-FD) |
| CAN 总线 2 | ESP32-S3 内置 TWAI(CAN 2.0B) |
| 协议 | CAN FD (灵活数据速率) |
| 接口 | SPI |
| 无线 | Wi-Fi 802.11 b/g/n + Bluetooth 5.0 LE |
| 供电 | USB 5V |
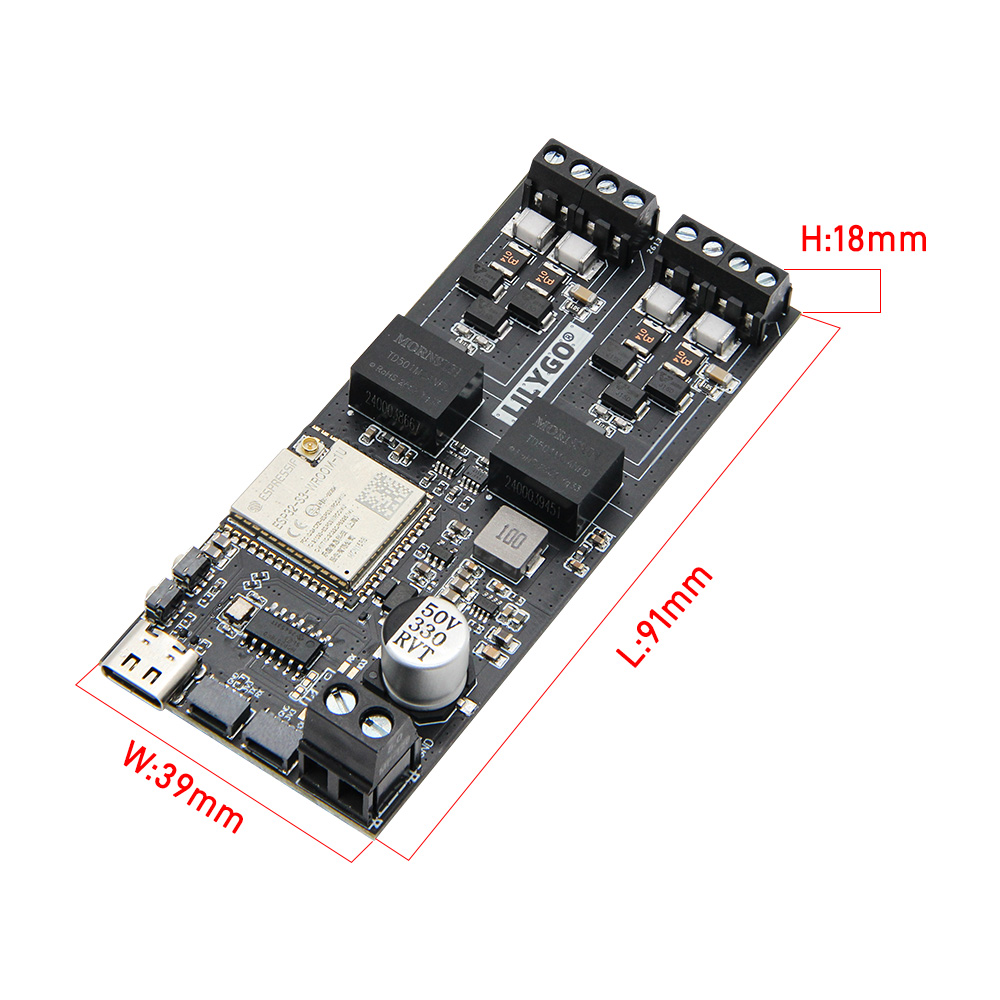
| 尺寸 | 待补充 |
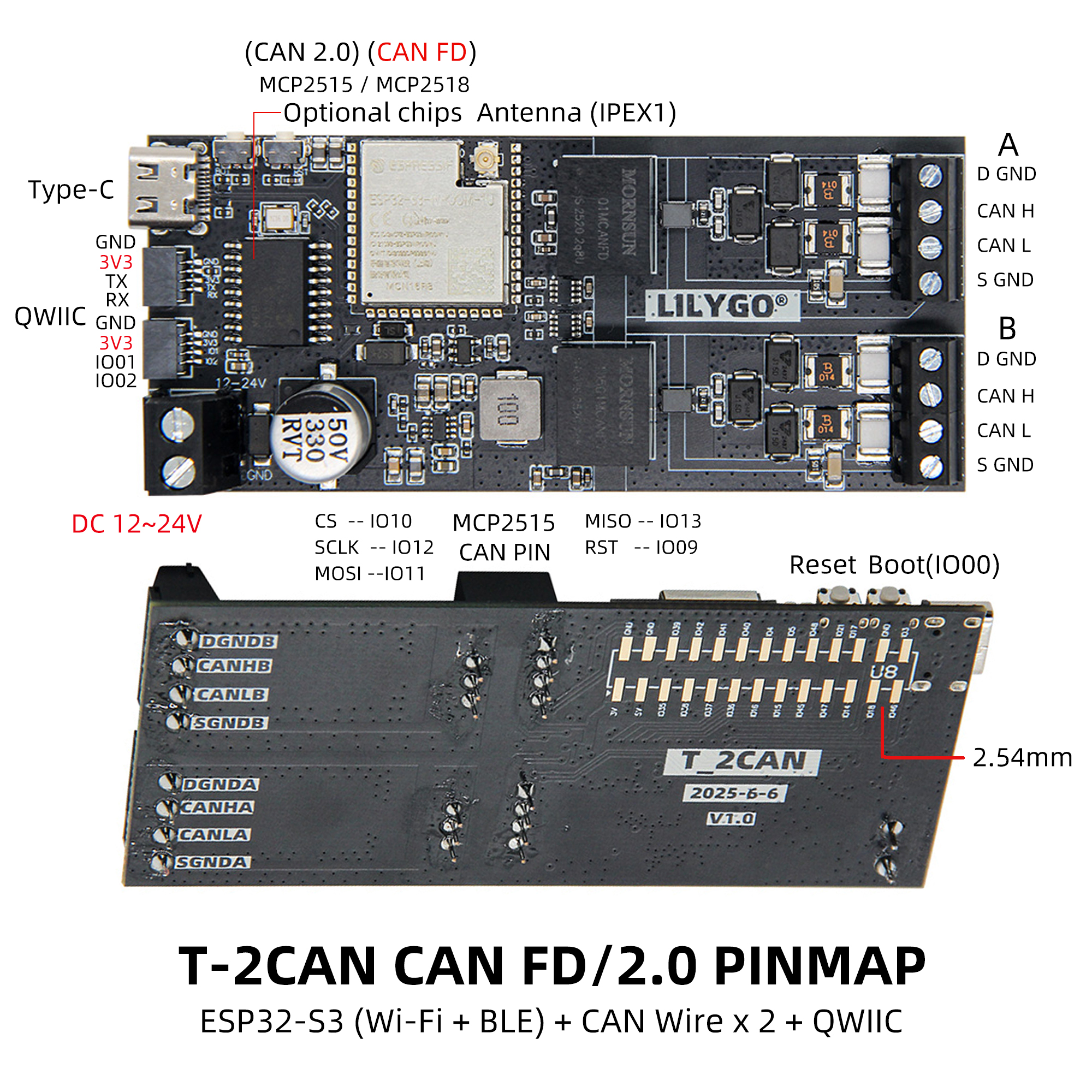
引脚图
引脚定义请参考配置文件:
pin_config.h
具体 GPIO 映射与 SPI 片选、中断引脚等详见上述头文件。
主要接口说明
| 接口 | 说明 |
|---|---|
| CAN1 | MCP2518FD CAN-FD 控制器,SPI 片选 CS1 |
| CAN2 | ESP32-S3 内置 TWAI 控制器 |
| USB | 默认作为 UART0 调试输出 |
| Uart 接口 | 外部 UART0(需配置 CDC 禁用) |
| BOOT-0 | 下载模式按键 |
| RST | 复位按键 |
尺寸图
原理图
数据手册
软件开发
- T-2Can GitHub 仓库
- Longan_CANFD 库(用于 MCP2518)
常见问题
Q:看了以上教程还是不会搭建编程环境怎么办?
A:可参考 LilyGo-Document 获取更详细的入门指导。
Q:打开 Arduino IDE 时提醒是否升级库文件,应该升级吗?
A:选择不升级。不同版本的库可能不兼容,建议使用项目自带的库版本。
Q:为什么板上的 Uart 接口没有串口数据输出?
A:项目默认将 USB 作为 UART0 输出。若要使用外部 Uart 接口:
- PlatformIO 用户:修改
platformio.ini,将build_flags = -DARDUINO_USB_CDC_ON_BOOT=true改为false。 - Arduino 用户:工具菜单中将 USB CDC On Boot 设为 Disabled。
Q:为什么板子一直烧录失败?
A:请按住 BOOT-0 按键同时重新下载程序。
Q:T-2Can-Fd 与 T-2Can 程序是否兼容?
A:不兼容。T-2Can-Fd 的 CAN 总线 1 使用 MCP2518FD 库,CAN 总线 2 使用 ESP32-S3 内置 TWAI,需使用对应的示例程序。
版本迭代
| 版本 | 发布日期 | 更新说明 |
|---|---|---|
| T-2Can-Fd V1.0 | 2026-04-10 | 初始版本,MCP2518FD + ESP32-S3 TWAI |